Lyapunov稳定性分析
李雅普诺夫稳定性
李雅普诺夫稳定是一种用于判断动态系统平衡点稳定性的理论,它描述了当系统从平衡状态收到微小扰动时,系统的状态如何变化。
稳定性分析
对于一个状态方程
李雅普诺夫稳定性(Lyapunov Stability):
如果系统从平衡点
受到一个微小扰动之后,系统状态 始终停留在 的某个小邻域内,则称平衡点 是李雅普诺夫稳定的。 渐近稳定(Asymptotically Stable):
如果平衡点是李雅普诺夫稳定的,并且系统状态
随时间趋向于 ,即 ,则称平衡点是渐近稳定的。 全局渐进稳定(Globally Asymptotically Stable):
如果无论初始状态在哪里,系统的状态
最终都会趋于平衡点 ,则称该平衡点是全局渐进稳定的。
稳定性判断
李雅普诺夫稳定性分析可以通过李雅普诺夫函数(Lyapunov Function)。它是一种类似于能量函数的构造,用来研究系统状态的变化趋势。
李雅普诺夫函数的构造
一个函数被称为李雅普诺夫函数,需要满足以下条件:
正定性(Positive Definite):
(即:函数在平衡点外为正,平衡点处为零)
函数的负定导数(Negative Definite Derivative)
计算李雅普诺夫函数沿着系统轨迹的导数:如果
在 处,说明系统的状态会趋向于平衡点。 渐进稳定的条件:
若对所有的 成立,则平衡点是渐进稳定的。 全局渐进稳定的条件:
如果李雅普诺夫函数在整个状态空间内都是正定的,并且其导数 也是负定的,则该点是全局渐进稳定的。
MATLAB代码实现
1 | % 定义系统向量场 |
其中的定义状态方程可以换成需要设置的对应的状态方程,下面给出一些典型的用于稳定性分析的状态方程的公式和图像分析:
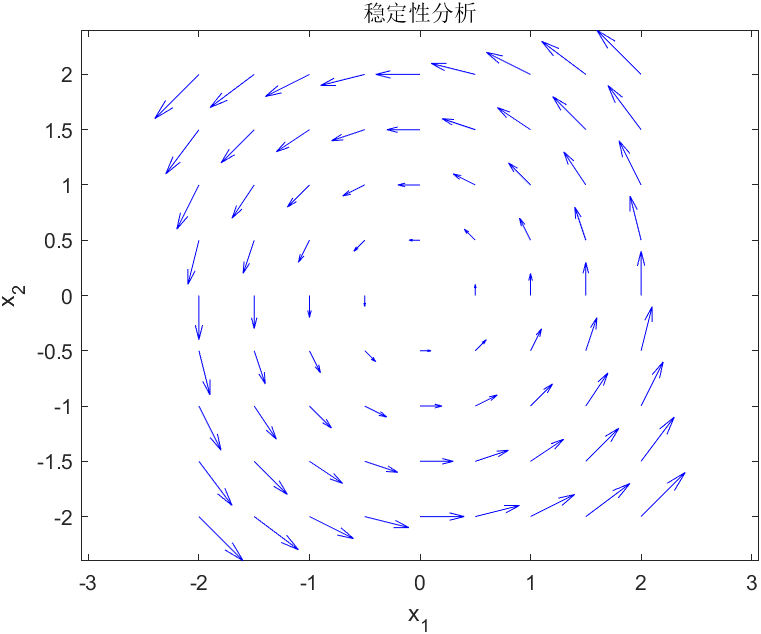
李雅普诺夫稳定但不渐近稳定的系统
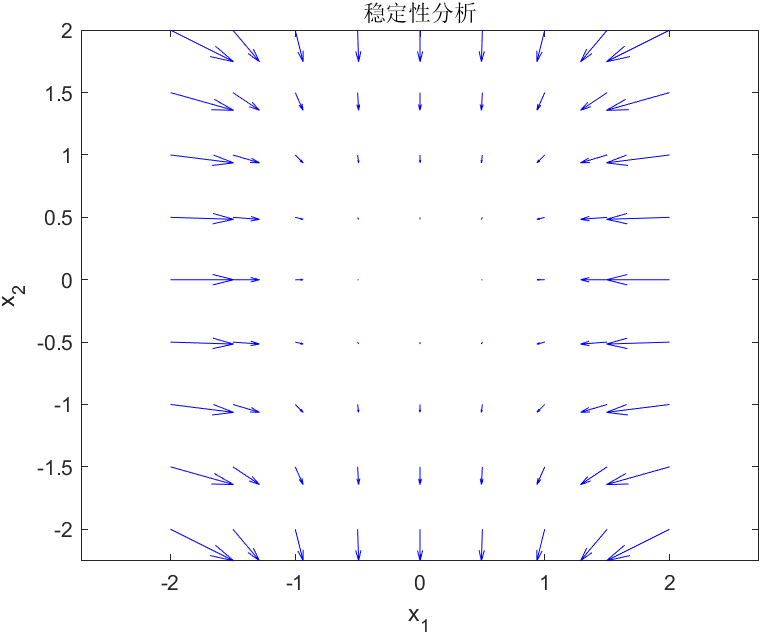
渐进稳定系统
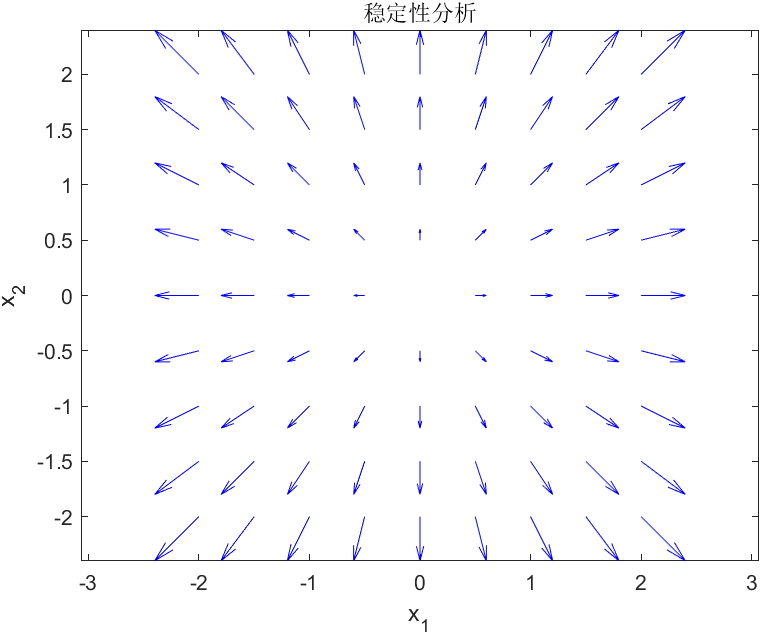
非线性全局渐进稳定系统
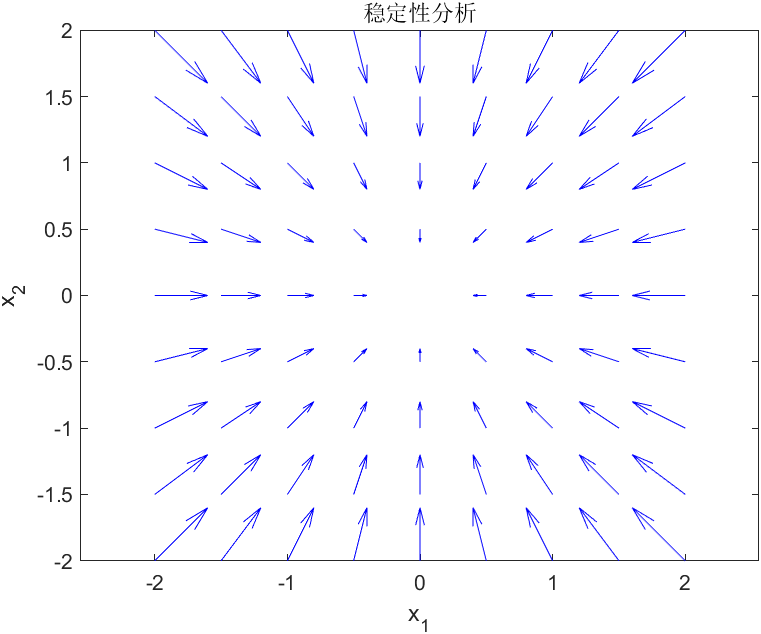
不稳定系统
图片绘制工具:MATLAB R2022a